スカラロボットの座標系と異なり、直行ロボットの座標系は1種類のみです。
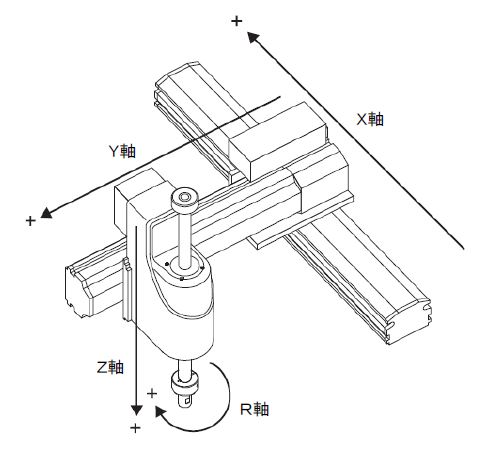
XYZの直行軸とR軸で構成されている機構が一般的です。第2軸以降の重量が変わらない場合、X軸が長尺になったとしてもモーターの出力を上げる必要がありません。真上から見下ろした可動範囲が長方形の場合に強みを発揮します。対するスカラロボットは可動範囲が広くなるほど体積と重量が大きくなります。
また、ケーブルベアにたくさんのケーブルやエアーホースを入れることができます。スカラロボットの場合は体内ケーブルの数が限られているので、ハンドに大量の配線を繋ぐ場合は直行ロボットが有利です。