ロボットを扱う上で必要となってくる3つの座標系の違いについて解説します!
- ・ベース座標系
・ワーク座標系 - ・ツール座標系
スカラロボットて何?
スカラロボットは、物をつかんで別の場所に置くいわゆるピックアンドプレース動作を得意としています。3つの回転軸と1つのZ直行軸を搭載しており、上空を旋回してワークの真上から垂直にアプローチする作業に適しています。
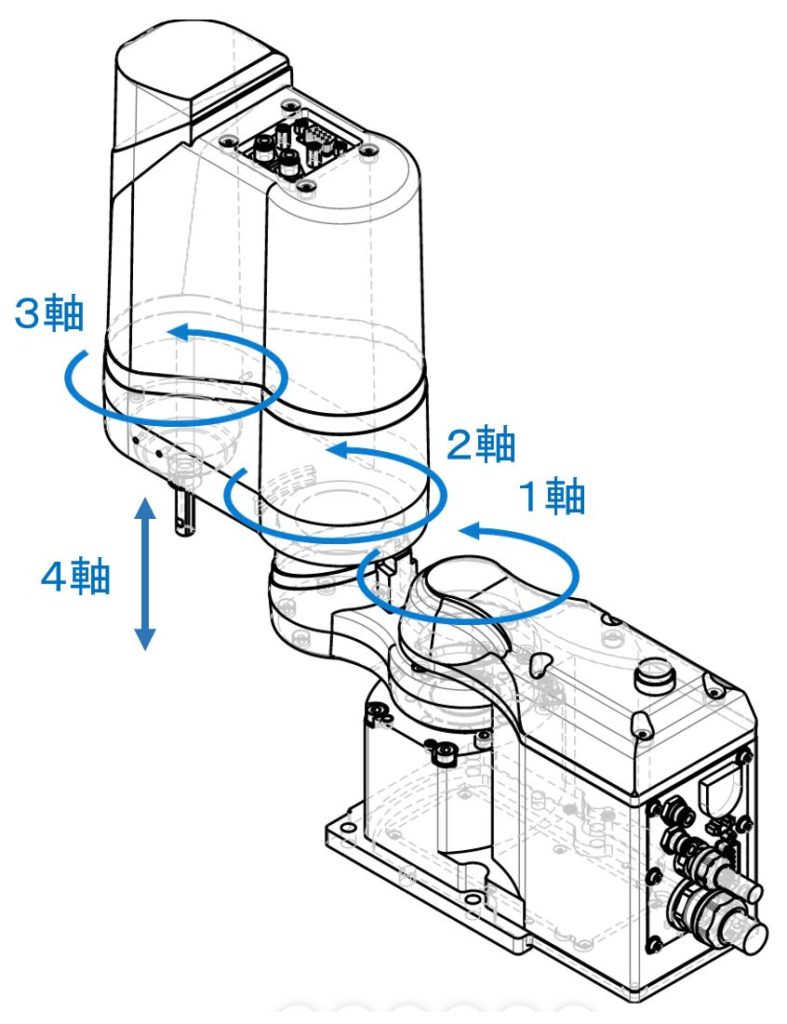
よく直行ロボットとスカラロボットのどちらを選ぶか迷ってる人がいますが、スピードを求めるならスカラロボットを押します。モータ3つが連動して動くためスピードが速いです。価格や可搬重量を考慮すると直行ロボットが有利な場合が多い(スカラロボットはイナーシャに弱い)ですが、スカラロボットは腕を折りたたむことができるため省スペースを実現できます。また、直行ロボットに比べて架台の大きさを1/5程度にすることができるため、やはり私はスカラロボットがいいと思います。
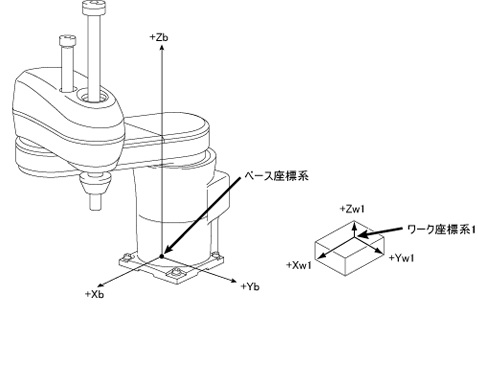
ベース座標系
ロボットのベース中心を原点とする直行座標+先端の回転軸がベース座標系です。
X軸、Y軸、Z軸、Θ軸の4軸で構成されているスカラロボットで最も一般的な座標系です。
Z軸はストロークの上端が、Θ軸はZ軸中心が原点となってます。
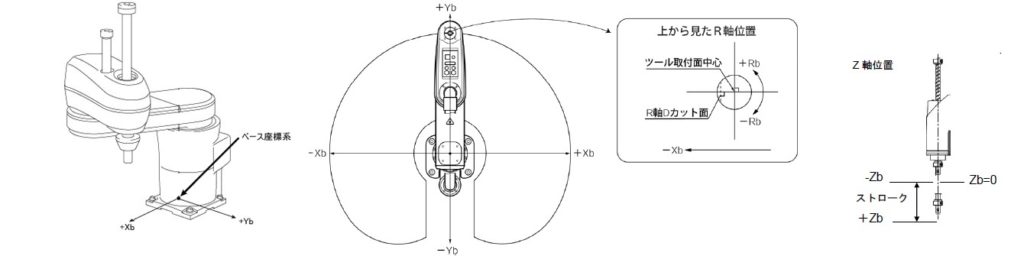
通常この手のロボットはXYZ座標を使ってポジションを指定します。4つの軸を個別に制御する各軸モードというものもありますが、使いずらいため使用することはありません。
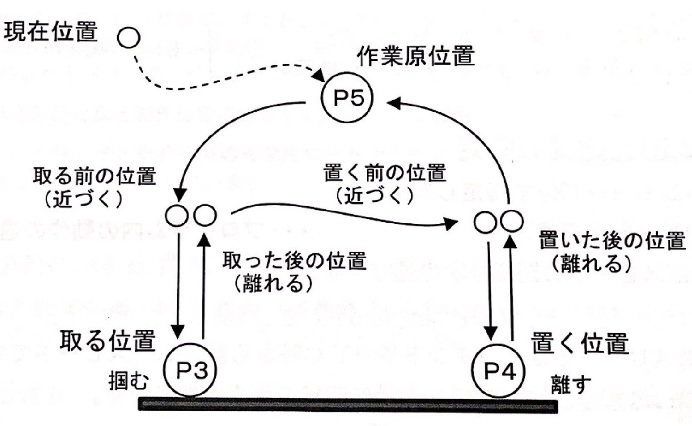
ワーク座標系
ワークやパレットなどの任意の場所に定義できる座標系です。置かれているワークを原点(0,0,0)と定義して、目標値を設定したい場合に使います。ワーク座標系は複数個定義することができるため、ワークの種類によって座標系を変えることができます。
※ワーク座標系は、最も使用頻度が少ない座標系です。
ツール座標系
ロボットアーム先端に取り付けたツールを原点として定義できる座標系です。設定した原点が操作時の回転中心となります。ツールがオフセットしている場合や、ロボットにダブルツールを持たせた場合に使います。状況によってツールを変えることで複数のツールに対応できます。ティーチングをした経験があればわかりますが、ダブルツールをベース座標系のままティーチングするのは至難の業です。
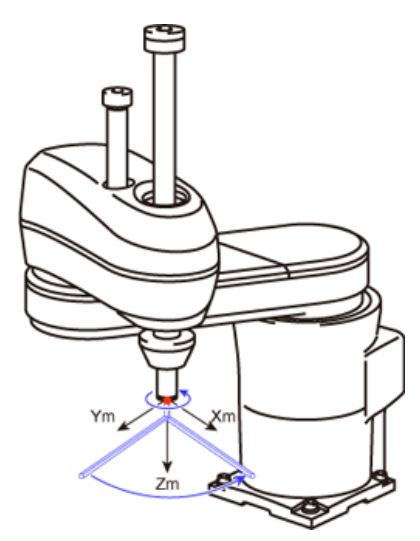
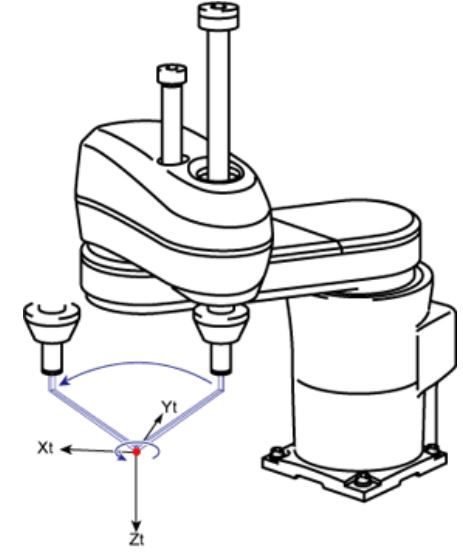
※ロボットに取り付けたチャックがZ軸からオフセットしている場合、ツール座標系の使用をおすすめします。