「誤操作」によるアクチュエータの衝突を防ぐためにソフトリミットを設定しておきましょう。
ソフトリミットはなぜ必要なのか
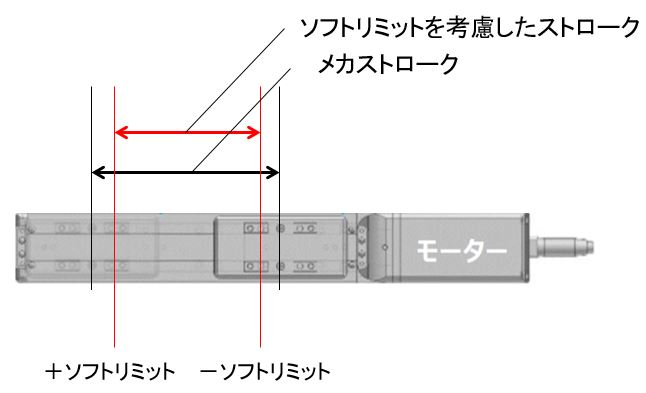
ロボシリンダを選定する際、機械的な制約によってメカエンドでスライダーが他ユニットと干渉する配置となる場合があります。例えばIAIロボシリンダRCP6の最小選択ストロークは50mm毎となってます。最大49mmは不要に長いストロークを選ぶことになるのです。干渉物との衝突を防止するために、ソフトリミットを入力して可動ストロークを制限しましょう。
なぜなら、ティーチング作業で位置情報の入力をミスる人がいるからです。ソフトリミットは人間の誤操作、誤入力の防止に有効な手段です。
ソフトリミットの設定方法
XSELパソコン対応ソフトの軸別パラメータで設定することができます。

設定後、ソフトリミット外への移動指令を出した瞬間にエラーが出るようになります。
スライダーがソフトリミットを超えた場合の復帰方法
ソフトリミットを設定すると他装置との干渉を防止することができます。ですが、スライダーがソフトリミットを超えた場合に発生する「ソフトリミットオーバーエラー」からの復帰には時間がかかります。エラー状態では、IAIコントローラがPLCからの信号を受け付けません。つまり、装置を操作盤からの操作で復帰させることはできないのです。そのため、パソコンかティーチングペンダントをコントローラに接続してJOGでスライダーをソフトリミット内に移動させましょう。もしくはコントローラの電源をオフした状態で手で強制的にスライダーをソフトリミット内に移動させてエラー解除する方法もあります。