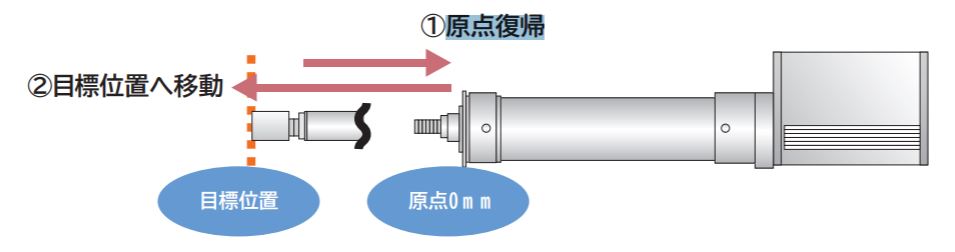
毎回決まった場所でゼロセットすることを原点復帰と呼ぶ
IAIのロボシリンダ・単軸ロボットに標準で搭載されているロータリーエンコーダは「インクリメンタル方式」を採用しています。INCREMENTALとは名前の通り、相対的な座標を意味します。これは、電源が供給されている間の相対的な移動量しか検出できいということなので、電源をOFFした場合は自分の位置を見失ってしまうということになります。
電源OFFする前に現在座標を記憶しておけばいいと思う人もいるかもしれません。ですが、それではダメなのです。電源が入っていない状態で人の手でロボットを動かした場合はどうなると思いますか?電源が入っていない間、エンコーダは進んだ距離をカウントしてくれません。ロボットは座標がズレた状態で動作するので正しいポジションに移動してくれず、最悪の場合は衝突します。
つまり、電源ONで座標のゼロ点調整が必要になります。毎回決まった場所でゼロセットを行うことで、正しい座標を検出することができるのです。このゼロ点調整動作を原点復帰と呼びます。
原点復帰命令の使い方についてはこちら
アブソリュート型は毎回の原点復帰が不要
一方、インクリメンタル方式のエンコーダーにバッテリーを搭載すしたものを「アブソリュート方式」と呼びます。ABSOLUTEとは絶対値を意味します。機械の電源をOFFしてもバッテリーが絶えず電気を供給し続けるため、エンコーダが自分の位置を見失うことがありません。便利ですが、数年に一度バッテリーを交換しなければならないデメリットもあります。バッテリー交換後はアブソリセットと原点復帰が必須です。バッテリーが不要なバッテリレスアブソリュートというものがありますが納期が長いことや軸長が長くなるといった理由で、あまり普及していない印象です。
- インクリメンタル:電源ONで毎回原点復帰が必要
- アブソリュート:原点復帰は一番最初に電源ONしたタイミングだけでよい
IAIで使える原点復帰方法は2種類あり、その仕組みを解説していきます。
押し当て方式
スライダーを端まで移動させ、メカエンドに機械的に接触させてゼロセットする方法が押し当て方式です。IAIで最も一般的な原点復帰方法です。原点復帰中に干渉物に接触した場合、その場所でゼロセットしてしまうので注意が必要です。
よく押し当て方式はメカエンドが摩耗するため原点がずれると言う人がいますが、その考え方は間違いです。原点復帰動作を厳密に説明すると、スライダはメカエンドに接触した後で反転し、エンコーダのZ相を検出してゼロセットを行っています。メカエンドが摩耗してもZ相の位置はずれないので摩耗は関係ありません。

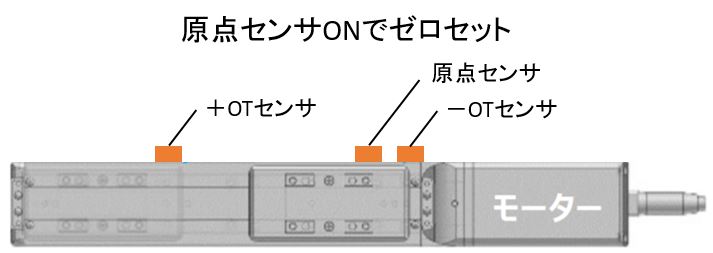
原点リミットスイッチ方式
スライダーを移動させて原点センサのONでゼロセットを行います。この方式も厳密にはエンコーダのZ相を原点とするため、センサのチャタリングで原点がズレることはありません。
通常、HOME(原点検出用)、+OT(反モータ側オーバートラベル)、-OT(モータ側オーバートラベル)の3つのセンサで構成されます。
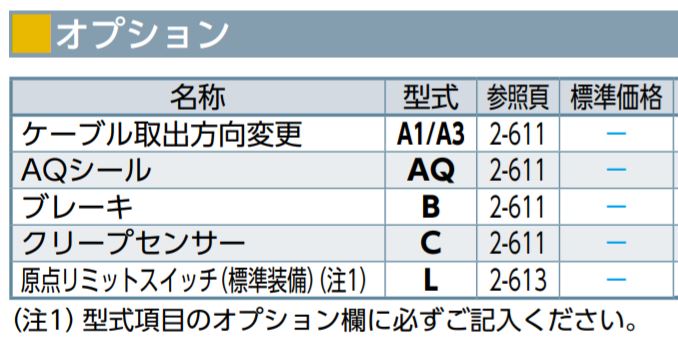
原点リミットスイッチを使う場合は型式にLを付け加えます。