前回の記事ではフィールドネットワークの動作モードについて記述しました。動作モードを決めたら次はコントローラとPLCをつなげてデバイスの割付を行いましょう。
デバイスの割付とは
難しく考える必要はありません。フィールドネットワークによるデバイスの割付という言葉は難しいので、「メモリの共有」と考えてください。IAIコントローラ内部のロボシリンダ制御信号と、PLC内のデバイスメモリを共有します。そうすることで、PLC側のデバイスで書き換えたデータが瞬時にIAIコントローラに反映されます。このメモリ共有動作をサイクリック通信と呼びます。
目標座標の設定方法と位置決め動作開始信号の出し方について
例えばRCONの直接数値指定モードでPLCの割付を行った場合、8ワードの制御信号がRCONとPLCで共有されます。PLCのデバイス割付設定画面で「先頭デバイス」と「サイズ」を入力してください。KeyenceのKV StudioでEtherNet / IPを使う場合、以下の画面となります。
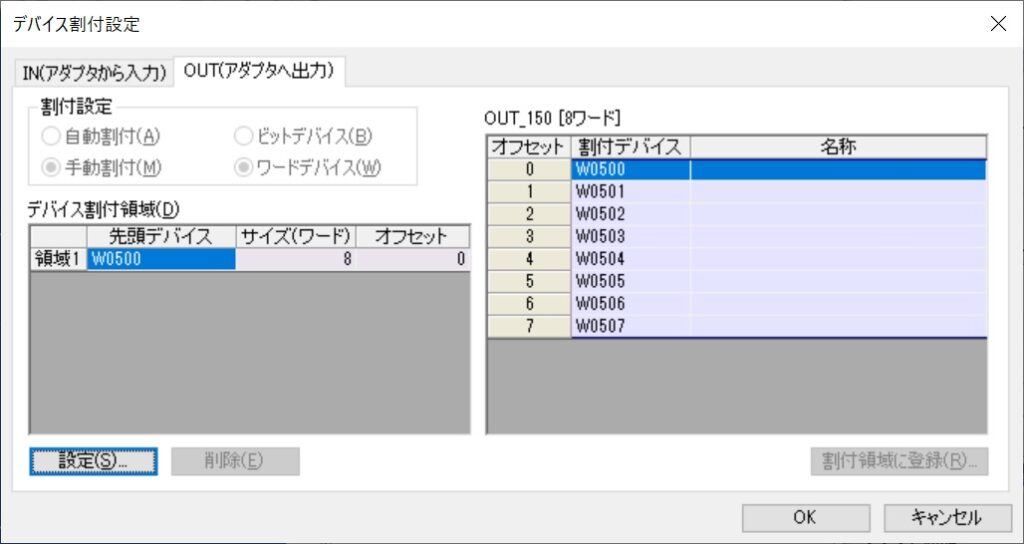
このように制御信号の先頭アドレスをPLCのW500に割付けた場合、以下表のように各制御信号がPLCのデバイスに割付されます。
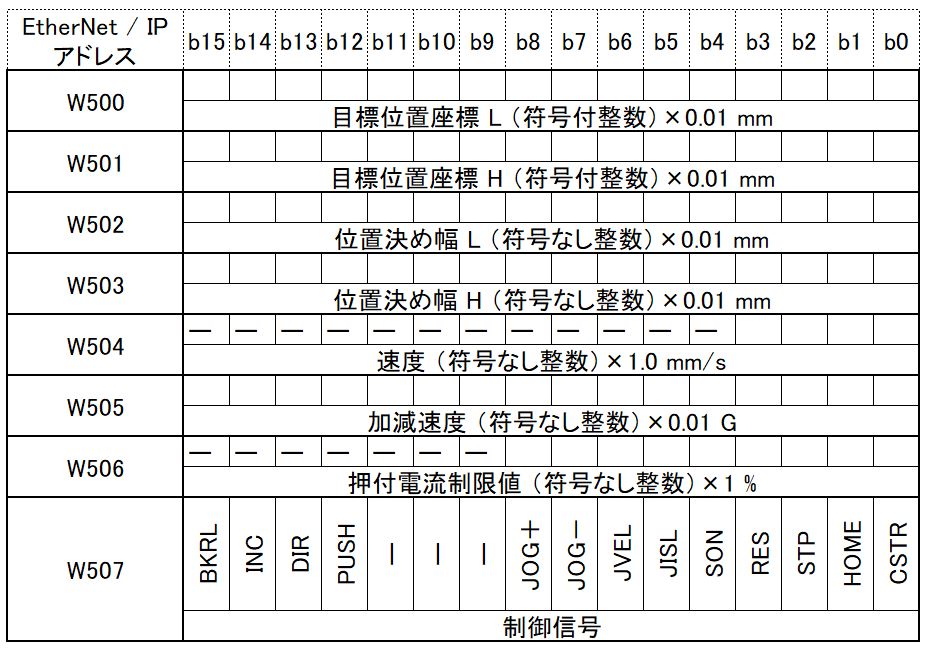
以下条件でロボシリンダを動かしたい場合、割付いているPLCの内部デバイスに設定値を入力します。
- 目標位置座標:+100 mm
- 位置決め幅:0.1 mm
- 速度:500 mm/s
- 加減速度:0.3 G
- 押付電流値:なし

設定値を入力し終えたら、位置決め動作開始信号(CSTR)をONしましょう。ロボシリンダが動きます。

補足:制御信号の内訳
制御信号出力の内訳は以下の通りです。
| ビット | 記号 | 内容 | 詳細 |
| b15 | BKRL | ブレーキ強制解除 | |
| b14 | INC | インクリメンタル | オンで相対値,オフで絶対値 |
| b13 | DIR | 押付け方向 | オンで原点と反対側へ |
| b12 | PUSH | 押付け動作 | |
| b11 | ー | ー | ー |
| b10 | ー | ー | ー |
| b9 | ー | ー | ー |
| b8 | JOG+ | +ジョグ動作 | 原点と反対側へ |
| b7 | JOG- | ージョグ動作 | 原点側へ |
| b6 | JVEL | ジョグ速度 / インチング距離切替 | |
| b5 | JISL | ジョグ / インチング切替 | オンでJOG,オフでインチング |
| b4 | SON | サーボオン | |
| b3 | RES | リセット | |
| b2 | STP | 一時停止 | |
| b1 | CSTR | 位置決め開始 |