スカラロボットのCP制御,PTP制御の違いを解説します。
基本的に
移動経路を重視する場合はCP制御
移動速度を重視する場合はPTP制御
を使用します。
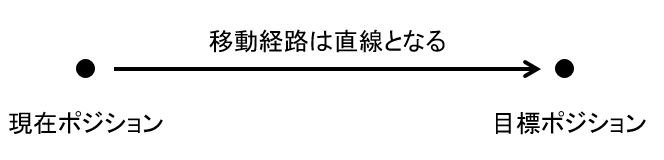
CP制御の説明(Continuous Path Control)
CP制御とは直線補間制御でロボットを動かす方式のことです。ロボットの各軸が補間し合いながら動作することで、アーム先端が現在座標から目標座標まで最短距離で移動することができます。
※移動中にロボットの腕系が変わるポジションへの移動はできません。
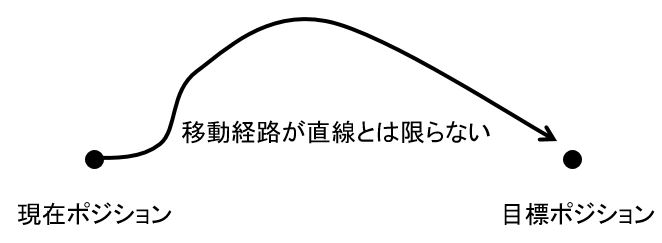
PTP制御の説明(Point to Point)
PTP制御とは動作時間が最短となるような制御方式です。出発点と終端点の位置と姿勢を重要視するため、途中の経路を問題としない方式です。移動経路はロボットの姿勢に依存するため、原則として直線動作はできません。
CP制御の動作時間が長くなる理由
直線で動くCP制御の方が移動時間が短いのでは?と思った人もいるかもしれません。
ですが、実際はPTP制御の方が高速に動作できるのです。
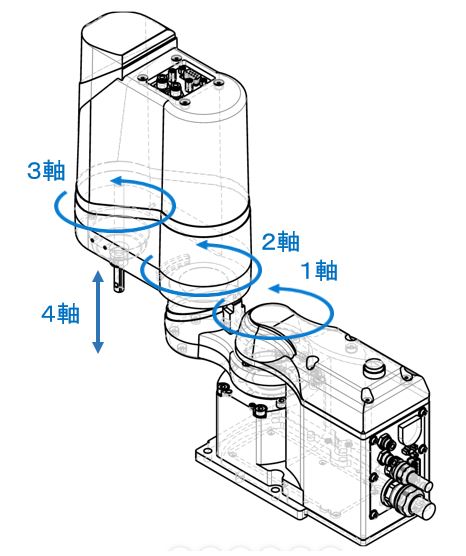
以下のスカラロボットの画像を見てください。
ロボットの1軸,2軸,3軸が回転軸になっていることがわかると思います。
全軸の複合動作で動くロボットに対して直線動作を要求するということは、各軸に速度制限をかけるということなのです。(回転軸がメインなのだから、弧を描いた方が速いのは当然)
もちろん制限をかけず自由に動けるPTP制御の方が動作時間は短くなります。