スカラロボットを扱うためには、腕形態による違いを理解しなければなりません。
可動範囲が違う
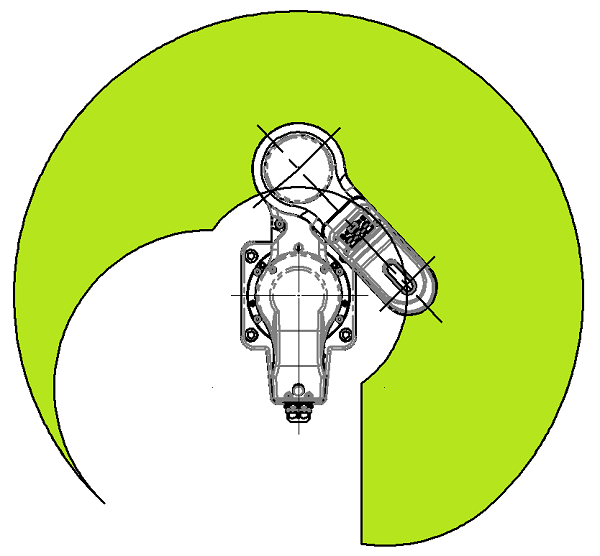
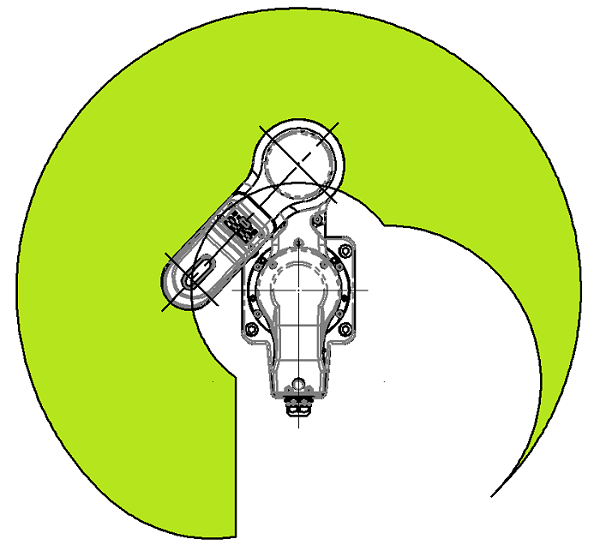
腕形態は第1軸、第2軸、第3軸の角度で決まります。左腕系を「LEFTY」、右腕系を「RIGHTY」と呼びます。ロボットの腕を人間の関節にたとえて表現しています。それぞれがカバーする動作範囲が異なるため、2種類の腕形態の違いを理解しておく必要があります。
- ・左腕系:右側をカバー
- ・右腕系:左側をカバー
図はスカラロボットを上から見下ろした絵です。アーム先端の軌跡が描ける範囲を黄緑色で示してあります。物理的に腕が届く範囲でもロボットの腕系によって動作可能領域が異なります。
腕系はプログラムで指定する
スカラロボットのプログラムではまず最初にRIGH、LEFT命令で腕系を指定してください。なぜかというと、腕系によってツールが移動する軌跡や肘の可動範囲が変化するからです。他のアクチュエータと干渉しないようにロボットの動作をイメージしながら腕系を設定してください。
腕系の切替えには時間がかかる
腕系を切替える場合はサイクルタイムを考慮する必要があります。なぜかというとロボットの肘をまっすぐに伸ばさないと腕系の切替えができないからです。
- 左腕系 → 肘を延ばす → 右腕系
少なくとも、この動作に0.5 秒かかります。ワークやロボットの配置ははなるべく腕系を切替えないように設定しましょう。
サーボOFFのときにしてはいけないこと
機械が異常を起こしたとき、人が手でロボットを押して端に寄せることがよくあります。その際に気を付けなければならないことは再起動時の腕形態です。人が人為的に腕系を変えてしまうと次のロボットの移動経路が変わります。衝突の原因となるため、サーボOFFのロボットを触った後は元の腕系・ポジションに必ず戻すようにしましょう。