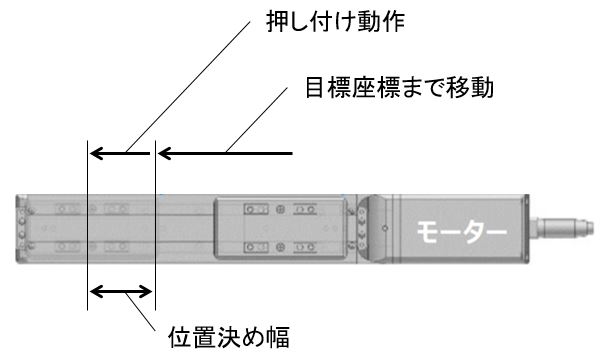
押し付け動作とは
対象物に一定の力をかけ続ける動作を押し付け動作と呼びます。IAIロボシリンダの場合、まずポジションテーブルの目標位置まで移動した後、指定した位置決め幅分だけワークを押し付けます。
動作の設定方法
RC/ECパソコン対応ソフトでポジションテーブルを開きます。詳細設定モードにすると、押付け力を入力できるようになります。位置決め幅は余裕をもって広げておきましょう。

押付け力はロボシリンダの定格出力を100[%]としたときの比率を入力します。
- 押付け力 [N]=定格出力 [N] × 設定値[%]
使用時の注意点
押し付け動作の速度は設定できません。
押し付ける対象物がなく空振りした場合はエラーとなります。
押付け力が極端に低い場合、そもそもスライダーが移動しません。20%以上を推奨します。
通常、XSEL,MSEL,単軸ロボットで押し付け動作は使用しません。